In this experiment, the time delay of light in a 15-meter fiber cable is measured using the TDC7201 Time-to-Digital Converter. Commonly available components were utilized for this setup. The fiber cables employed are inexpensive Toslink optical cables. The measured delay in the 15-meter cable is 99.2 ns. In a vacuum, the light would travel the same distance in 50 ns. Generally, the refractive index of fiber cables is 1.3, but this specific cable seem different. In a previous test using a 10-meter cable of the same brand, the measured delay was 65.8 ns, indicating correlation between the results from the same cable type. Their refractive indexes are same.
Component list
- Arduino Due or a similar microcontroller with SPI and 3.3V logic level
- TI TDC7201 evaluation board datasheet
- Red light laser
- 2 photodiodes
- 7404 for basic laser diode driving (or any transistor-based driver would suffice)
- OLED or another display (optional), as output is also provided through the serial terminal
- 15-meter optical cable
- Optical splitter
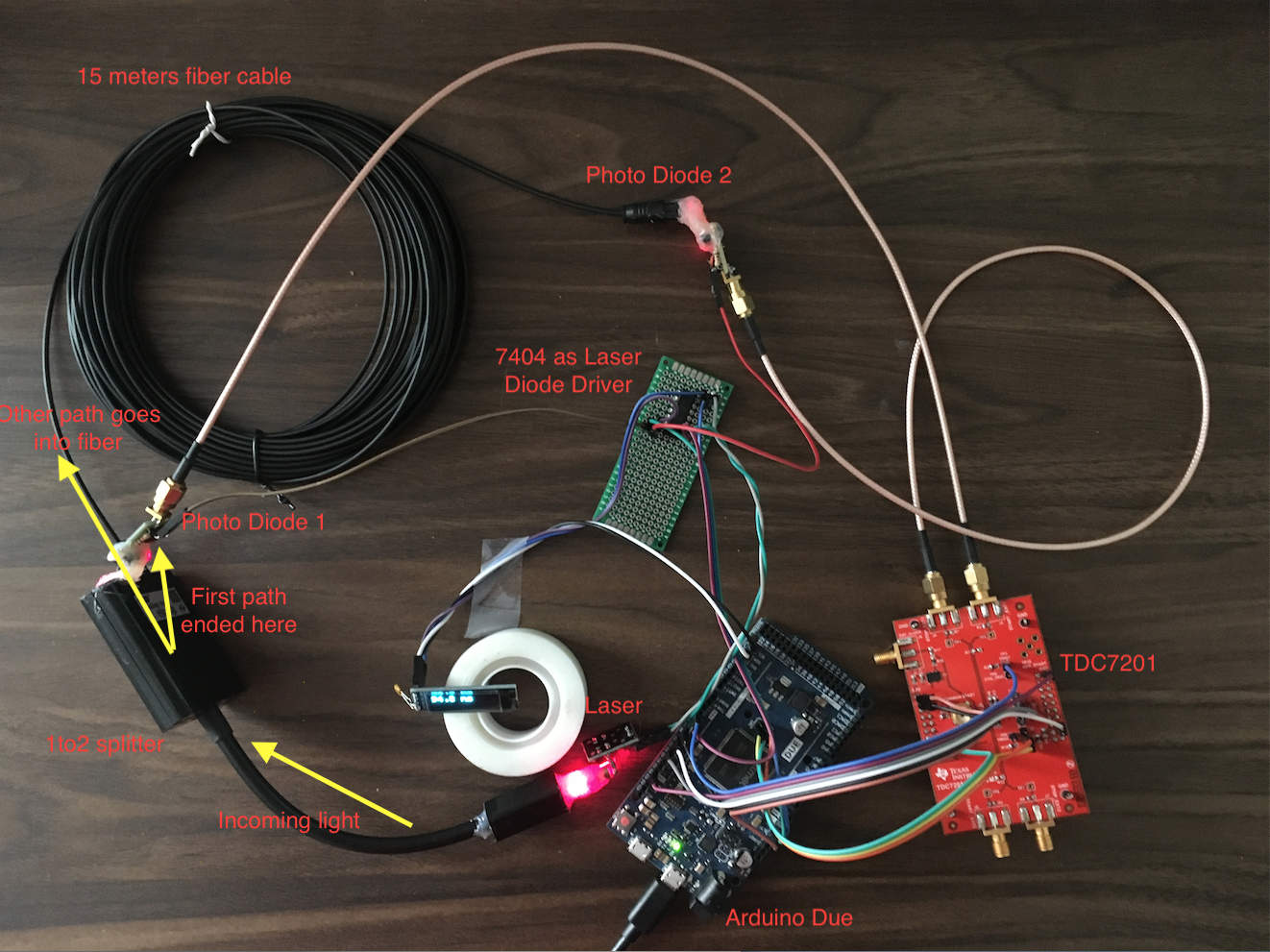
Experiment setup
Arduino Due code
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
//#define OLED_LCD
#ifdef OLED_LCD
#define OLED_RESET 4
#define NUMFLAKES 10
#define XPOS 0
#define YPOS 1
#define DELTAY 2
#define LOGO16_GLCD_HEIGHT 16
#define LOGO16_GLCD_WIDTH 16
Adafruit_SSD1306 display(OLED_RESET);
#endif
#define CS 10
#define EN 7
#define TRIGG 4
#define LASER 5
#define FINISH 8
#define FILT_SIZE 64
#define TDC_CLK 8 //8 MHZ
enum reg_list
{
TDCx_CONFIG1,
TDCx_CONFIG2,
TDCx_INT_STATUS,
TDCx_INT_MASK,
TDCx_COARSE_CNTR_OVF_H,
TDCx_COARSE_CNTR_OVF_L,
TDCx_CLOCK_CNTR_OVF_H,
TDCx_CLOCK_CNTR_OVF_L,
TDCx_CLOCK_CNTR_STOP_MASK_H,
TDCx_CLOCK_CNTR_STOP_MASK_L,
TDCx_TIME1=0x10,
TDCx_CLOCK_COUNT1,
TDCx_TIME2,
TDCx_CLOCK_COUNT2,
TDCx_TIME3,
TDCx_CLOCK_COUNT3,
TDCx_TIME4,
TDCx_CLOCK_COUNT4,
TDCx_TIME5,
TDCx_CLOCK_COUNT5,
TDCx_TIME6,
TDCx_CALIBRATION1,
TDCx_CALIBRATION2
};
enum states
{
START,
MEASURE
};
volatile uint8_t trig_ready=0;
volatile uint8_t done=0;
uint8_t state=0;
double last[FILT_SIZE];
uint8_t i=0;
double mean;
uint8_t readRegister(uint8_t reg_add)
{
SPI.transfer(CS, reg_add, SPI_CONTINUE);
return SPI.transfer(CS, 0x00, SPI_LAST);
}
void writeRegister(uint8_t reg_add, uint8_t data)
{
SPI.transfer(CS, 1 << 6 + reg_add, SPI_CONTINUE);
SPI.transfer(CS, data, SPI_LAST);
}
uint32_t read3(uint8_t reg_add)
{
SPI.transfer(CS, reg_add, SPI_CONTINUE);
uint32_t data = SPI.transfer(CS, 0x00, SPI_CONTINUE) << 16;
data += SPI.transfer(CS, 0x00, SPI_CONTINUE) << 8;
data += SPI.transfer(CS, 0x00, SPI_LAST);
return data;
}
void trigger()
{
trig_ready = 1;
}
void finish()
{
done = 1;
}
void setup() {
#ifdef OLED_LCD
// initialize with the I2C addr 0x3C (for the 128x32)
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.println("TDC");
display.display();
#endif
// initialize digital pin LED_BUILTIN as an output.
SPI.begin(CS);
SPI.beginTransaction(SPISettings(50000, MSBFIRST, SPI_MODE0));
SPI.setClockDivider(CS, 84);
pinMode(LED_BUILTIN, OUTPUT);
pinMode(LASER, OUTPUT);
pinMode(EN, OUTPUT);
digitalWrite(LASER, HIGH);
digitalWrite(EN, LOW);
delay(100);
digitalWrite(EN, HIGH);
delay(100);
#ifdef OLED_LCD
display.clearDisplay();
display.setCursor(0,0);
display.print("0x");
display.println(readRegister(1), HEX);
display.print("0x");
display.println(readRegister(3), HEX);
display.display();
#endif
Serial.begin(115200);
pinMode(TRIGG, INPUT_PULLUP);
attachInterrupt(TRIGG, trigger, RISING);
pinMode(FINISH, INPUT_PULLUP);
attachInterrupt(FINISH, finish, FALLING);
interrupts();
}
double tof()
{
double diff = (double)read3(TDCx_CALIBRATION2);
diff -= (double)read3(TDCx_CALIBRATION1);
diff /= (10.0-1.0);
diff = (1000.0 / TDC_CLK) / diff;
diff *= (double)read3(TDCx_TIME1);
return diff;
}
void loop() {
switch(state){
case 0:
writeRegister(TDCx_CONFIG1, 0x01);
state = 1;
break;
case 1:
if(trig_ready)
{
trig_ready = 0;
digitalWrite(LASER, LOW);
state = 2;
}
break;
case 2:
delay(20);
if(done)
{
done = 0;
digitalWrite(LASER, HIGH);
state = 3;
}
break;
case 3:
last[++i % FILT_SIZE] = tof();
mean = 0;
for(uint8_t j = 0; j < FILT_SIZE; j++)
mean += last[j];
Serial.println(mean / FILT_SIZE, 1);
#ifdef OLED_LCD
noInterrupts();
display.clearDisplay();
display.setTextSize(2);
display.setTextColor(WHITE);
display.setCursor(0,0);
display.print(mean / FILT_SIZE,1);
display.println(" ns");
display.display();
interrupts();
#endif
state = 0;
break;
default:
break;
}
}