I implemented Q-learning as a substitute for the PID controller in a self-balancing two-wheeled robot. Each vertical position serves as a training iteration. After several steps, the robot learns to maintain its balance autonomously. I’ll be sharing the code soon.
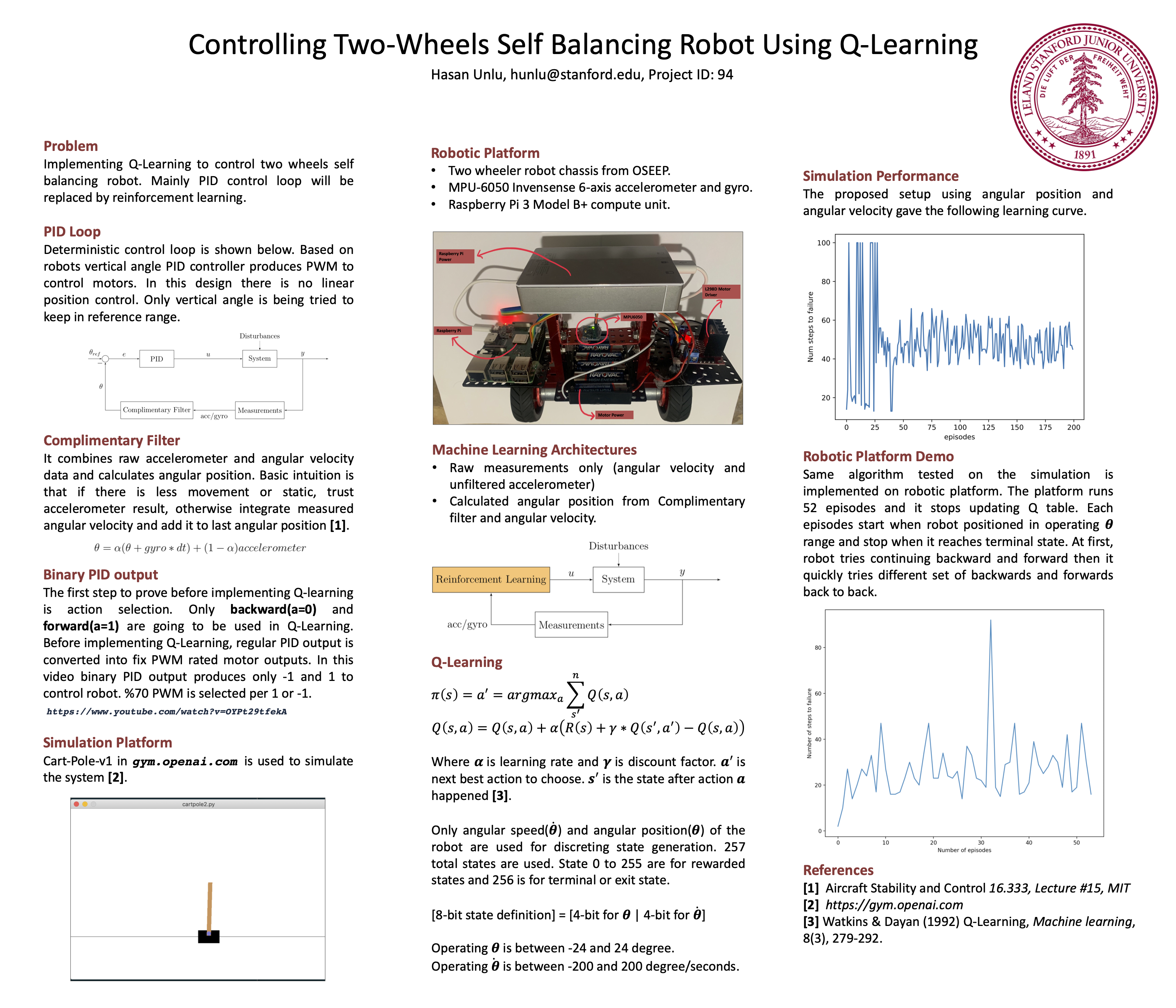
Poster Presentation